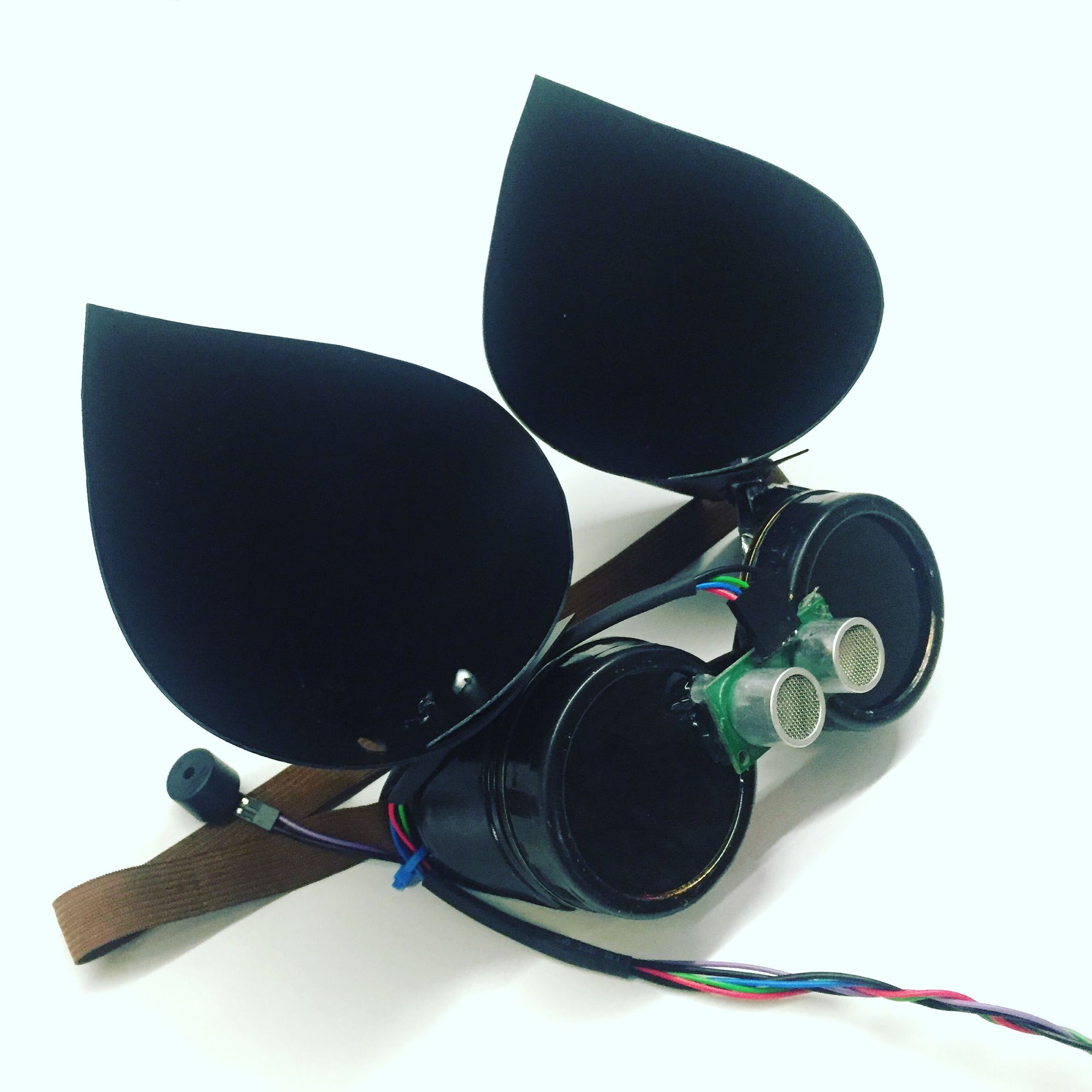
Bat goggles
These were developed to mimic as closely as possible bio-sonar using an Arduino, HC-SR04 Ultrasonic distance sensor and a piezo buzzer as part of a workshop to introduce school children to the basics of electronics and coding.
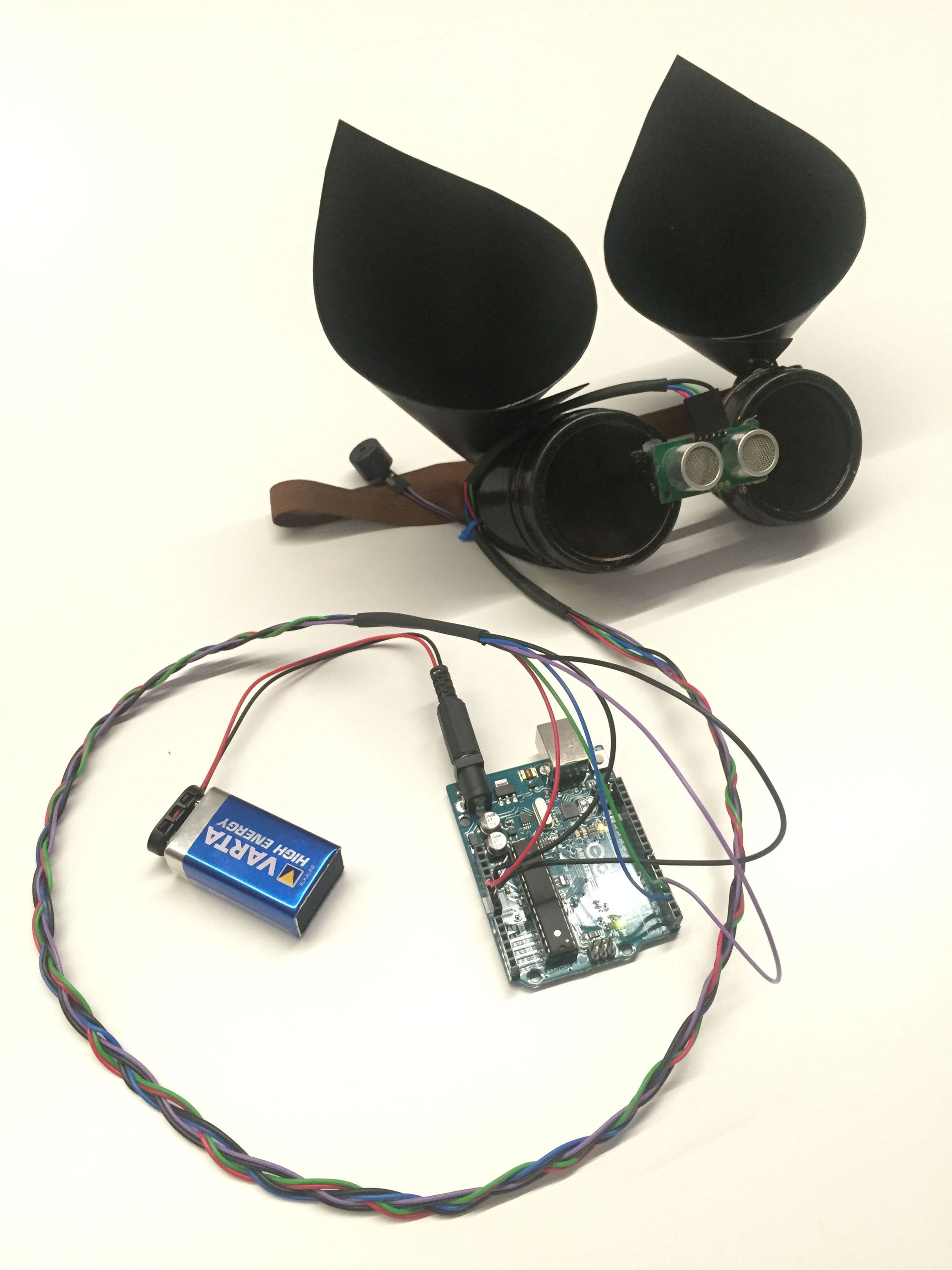
Electronics
The circuit is very simple for this particular project. It proved cheaper to import Arduino’s from China than to use a stripped down circuit such as the shrimp.
Code
This code is based on Suneth Attygalle’s batgoggles code, and the Arduino Ping Tutorial
// declare the pins
const int trigPin = 5;
const int echoPin = 6;
const int buzzerPin = 4;
// set up constants
const long scalingfactor = 10;
// set global variables
int cm;
unsigned long time1, time2, i, duration;
unsigned long maxtime = 1000;
void setup() {
// initialise all the pins
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzerPin, OUTPUT);
// uncomment this if you need to check why things aren't
// working
// Serial.begin(9600);
}
void loop() {
// beep
tone(buzzerPin, 262); // sets the note to middle c (ish)
delay(90);
check_distance();
// if the sensor doesn't time out remove the time it took for
// the sensor to be polled from the remaining delay so that
// the beeps remain even
if (time2-time1<30) {
delay(60-(time2-time1));
}
noTone(buzzerPin);
// delay
i = 0; // resets the counter
while (i < maxtime){ // do this until maxtime is reached
if (i % 60 == 0){
check_distance();
}
delay(1);
++i; // increment counter
}
}
void check_distance(){
// note the time before checking the sensor
time1 = millis();
// The sensor is triggered by a HIGH pulse of 10 or more
// microseconds. Giving a short LOW pulse beforehand ensures a
// clean HIGH pulse.
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// read the signal from the sensor: a HIGH pulse whose duration
// is the time (in microseconds) from the sending of the Ping
// to the reception of its echo from an object. This will time
// out after 30ms.
duration = pulseIn(echoPin, HIGH);
// note the time after checking the sensor
time2 = millis();
// translate the pulse duration into centimeters
// The speed of sound is 340 m/s or 29 microseconds per
// centimeter. The ping travels out and back, so to find the
// distance of the object we take half the distance travelled.
cm = duration / 29 / 2;
maxtime = cm * scalingfactor;
// Not sure why it's not working? Uncomment this to check that
// your sensor is giving the correct output
// Serial.print(duration);
// Serial.print(\" millis\");
// Serial.println();
// Serial.print(cm);
// Serial.print(\" cm\");
// Serial.println();
}
Because of the age of the children involved in this workshop we didn’t use the Arduino IDE to create the code, instead we used a graphical interface (Ardublockly). I added a few new blocks to make it work for what I wanted but unfortunately ran out of time to get my code merged into the main codebase.